

The MB Dynamics Steering Module Test System (SMTS) is an assembly of components and software designed to facilitate the quiet testing, development, troubleshooting, and auditing of a variety of steering gear and steering column assemblies – collectively referred to as steering modules. The system can also be used to test/audit steering system components and parts. The SMTS test rigs are non-hydraulic, there is no high pressure oil, no risks of leaks and maintenance headaches, no negative environmental impact, and much lower equipment noise levels. While not a durability rig, the SMTS may be used to condition or wear a steering module to varying stages of useful life within SMTS equipment limits.
EPS | MDPs |
EPHS | HPS |
EPAS | ColPAS |
ADAS | Automated Driver Systems |
Zipper | Reversal Clunk |
Growl | Steering Nibble |
Howl |
Evaluate noises during critical driving conditions |
High velocity parking lot manueuvers in tight spaces with large, rapid angle changes at Zero vehicle speeds |
Characterize steering performance during low frequency (e.g. 0.2 Hz) Sinusoids, Triangle Wave, Trapezoid, and CSV position inputs to the steering wheel |
- Test for annoying rattle and running noises due to road-excited stimuli and customer-actuated driving maneuvers to diagnose and fix root causes
- Apply full range of forces (static and dynamic) over full range of tie rod end positions (any position between lock to lock, nominally 200mm p-p) and over full range of tie rod angular positions: jounce, rebound, fore, aft
- Condition or wear gears and other components in the lab to accumulate accelerated customer-equivalent kilometers (life cycle assessment), then assess rattle and NVH performance on the same test equipment
- Use various static and dynamic loads from the wheel/tire/road interface (measured on tie rod loads) and applied by Rack Load Simulator in combination with steering wheel positions and driving maneuvers applied by Driver Simulator to assess steering and EPS performance
- Use physical tests to validate and correlate math models and model-based development of electric control system performance algorithms
- Quietly produce accurate, controlled, repeatable inputs to the in-vehicle steering wheel to enable acquisition of acoustic data and wheel motions during zero-vehicle-speed and simulated parking maneuvers to characterize in-vehicle zipper and other steering noises
- Evaluate effect on warranty costs and customer satisfaction of EPS algorithms that neutralize and cancel driver-perceived wheel oscillations due to wheel and rotor imbalance and other driving conditions over prolonged periods
- Evaluate stick-slip, lash, torsional stiffness, and hysteresis performance characteristics of I-shafts, inner tie rods, columns, couplings/isolators and combinations under environmental, wear and various boundary conditions
- Discriminate between steering technologies and supplier offerings, based on their propensity to rattle, cause other annoying noises, plus other driving-dynamics metrics
- Benchmark competitor steering gears, I-shafts, columns, etc.
- Fulfill the following steering test procedures: GMW16216, GMW17112, GMW14479, GMW17207, GMW15599, GMW17422, Ford CETP 01.01-L-407, Ford CETP 11.04-E-400, Ford ESECPC-3C529-A4 III.B.1.5, Ford ESECPC-3C529-A4 III.B.3.1, Ford ESECPC-3C529-A4 III.C.1.6, Ford ESECPC-3C529-A4 III.C.1.8, Ford Engr Spec III.C.1.13, and Ford ESAE5C-3280-AA
- Extremely quiet electric/acoustic rack load simulator, with tie rod force simulation
- Acoustically and electrically quiet driver simulators for inputting and controlling steering wheel position, velocity and torque values to columns and I Shafts
- Onboard hardware and software mitigates EPS motor pole-passing cogging, torque and force fluctuations
- PC-based dynamic controllers with supplied sensors and signal conditioning for angle, displacement, force, acceleration, and torque parameters, as required for multi-axis closed-loop control
- Additional options: gear fixtures, column stands, road load data acquisition (RLDA), NVH test analysis system – for recording and objective evaluations of noise and vibration parameters
- For more information please contact MB Dynamics at [email protected]
Explore MB Dynamics' Steering Test Software & Hardware
MB Dynamics delivers steering test equipment to help fulfill a myriad of application test requirements, or jobs-to-be-done.
- Software for multi-test-head, synchronized MIMO closed-loop control and data acquisition.
- Rotary servo motors for attachment to a steering spline or wheel.
- Electrodynamic shaker systems.
- Long-stroke linear motor actuators.
- Pneumatic actuators; column stands for mounting steering column.
- Gear fixture for mounting the gear; instrumentation (force, torque, displacement, rotary position, acoustic, acceleration).
- Fixtures for mounting gears and columns.
- Brackets, clamps, and fixtures for holding test items.
- Jounce/rebound fixtures and tilt positioners for aligning input forces with tie rods at angles.
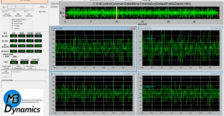
- Software and associated data acquisition hardware up to 16 channels for recording, analysis and evaluation of in-lab steering noises and accelerations, road load data acquisition, and general sound and vibration analysis.
- Engineering services to accelerate test effectiveness.
A significant value-added benefit for end-users, and what truly sets MB Dynamics apart from its competition, is its depth and breadth of Engineering Services. These services allow end-users to benefit from MB’s industry-exclusive wealth of testing know-how, gained over the company’s nearly 80-year history. This knowledge base allows customers to shorten their learning curve, while becoming more effective at achieving sought-after test results, far more efficiently than could be achieved without MB’s involvement. As a result, the end-user is able to apply knowledge for both time and cost-savings.
MB Dynamics’ Test Engineering Services have been found useful to develop steering specific test procedures and test processes, to perform test planning and results evaluation, for accelerated learning of the technology, and for data acquisition and analysis. This unique expertise is made available to MB Dynamics’ steering test systems, hardware and software, please contact us.
Our Engineering and Sales Teams are Standing By
Ready to take delivery of steering test software & hardware? Pre-sale or engineering questions?

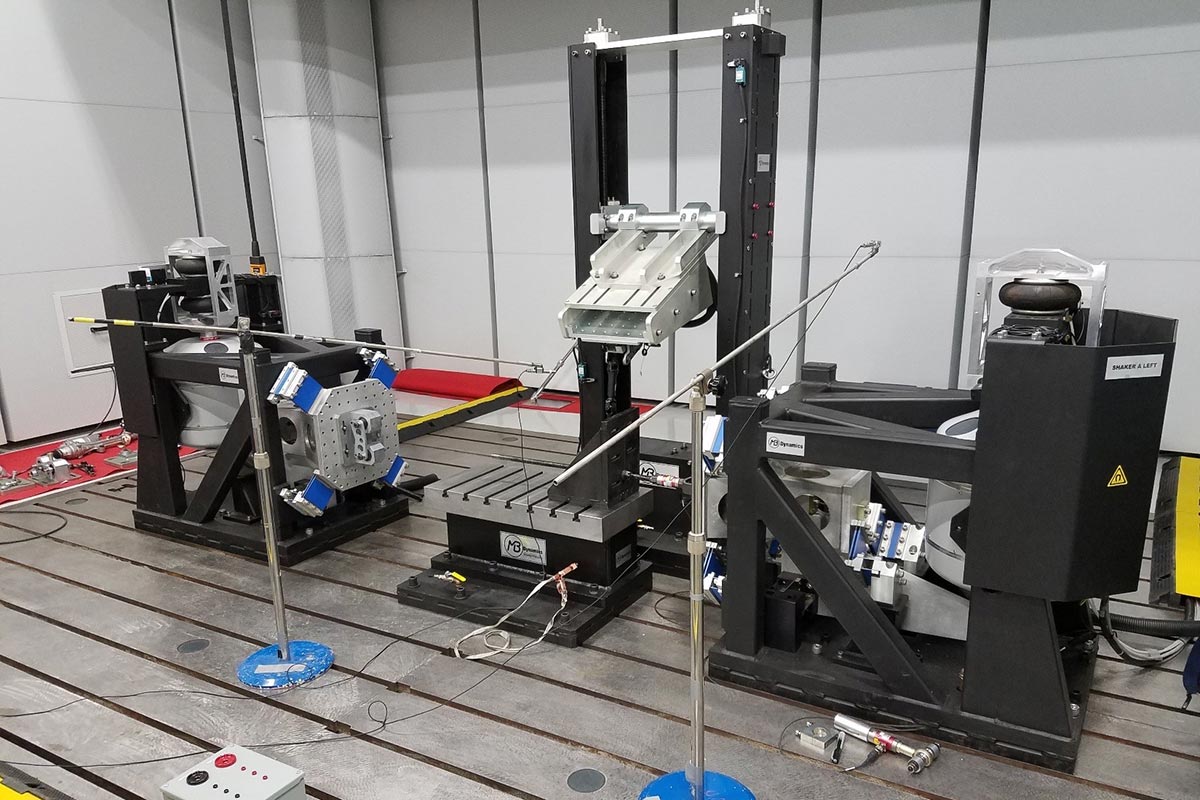
A quiet (acoustically and electrically), non-hydraulic, turnkey lab test system consisting of a customer-specific combination of equipment and software that simulates driver functions into the steering column or wheel and road and vehicle inputs acting on a steering system through the tie rods.

MB Millenium SMTS software provides an executive function over the embedded control systems for the MB Driver Simulator (DS) and the two MB Rack Load Simulators (RLS). This executive software assures that only one embedded sub-system performs position control over the steering spline or the two tie rods.

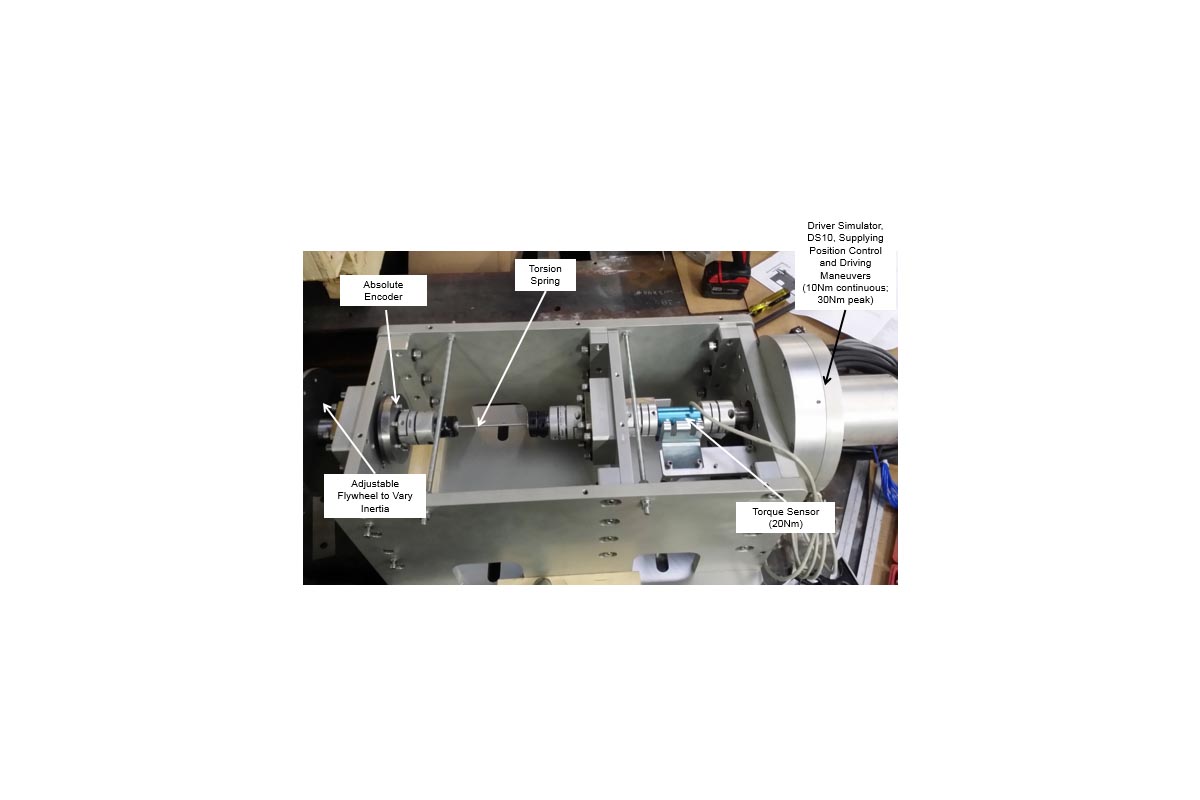
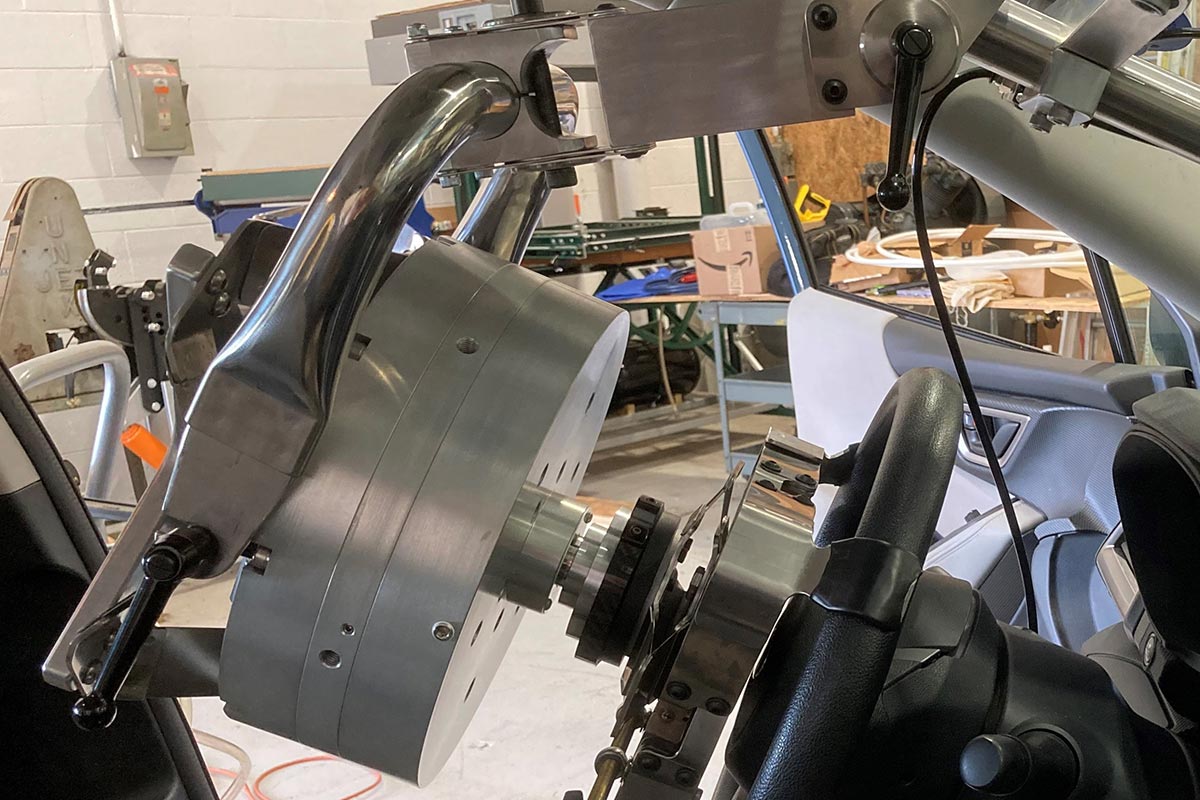
The MB Driver Simulator product family is used to simulate driver functionality by generating repeatable and precise steering maneuvers of position/angle, angular rate, or torque using imported time histories of measured drive files or user-customizable sine, triangle, and trapezoid waveform plus CSV-imported position vs time and torque vs time.

The In-Car Driver Simulator (In-Car DS) quietly produces accurate, controlled, inputs to the in-vehicle steering wheel to enable acquisition of acoustic data and wheel motions during zero-vehicle-speed and simulated parking maneuvers to characterize in-vehicle zipper and other steering noises.

Rack load simulators (RLSs) are electric, electrodynamic or pneumatic devices that apply programmable static, quasi-static and dynamic loads to one or both tie rods (synchronized with each other), delivering force vs. steering wheel/column position or force vs. time (force time histories) under closed-loop MIMO control.

As a variant on a Steering Module Test Simulator (SMTS), our Column EPS Test Bench is a quiet (acoustically and electrically), non-hydraulic, turnkey lab test system used to perform all rattle, NVH and functional tests on a column EPS just like those performed on rack-mounted EPS units.

The MB intermediate shaft test system is used to evaluate stick-slip, lash, torsional stiffness, hysteresis and other performance characteristics of I-Shafts, inner tie-rods, columns, couplings and isolators or combinations under environmental, wear and various boundary conditions.

MB provides a Column Stand for mounting a steering column assembly, column EPS, and or a Driver Simulator. The steering column attaches to this Column Stand using MB-supplied, or end-user supplied, brackets at the same structural connect points where the column attaches in the vehicle.